Schulich Space Rover Team

The Schulich Space Rover Team (SSRT) is one of the top student-led engineering teams at the University of Calgary. As mentioned on the home page, the team competes in the CIRC every summer in Drumheller alongside typically 20-30 teams from all across the world.
I was on the team for three years, and during that time I was both a regular member and the lead for the mechanical-rover division, which deals with all the mechanical aspects of the body of the rover itself, such as the chassis, legs, wheels, and enclosure.
2022 - 2023
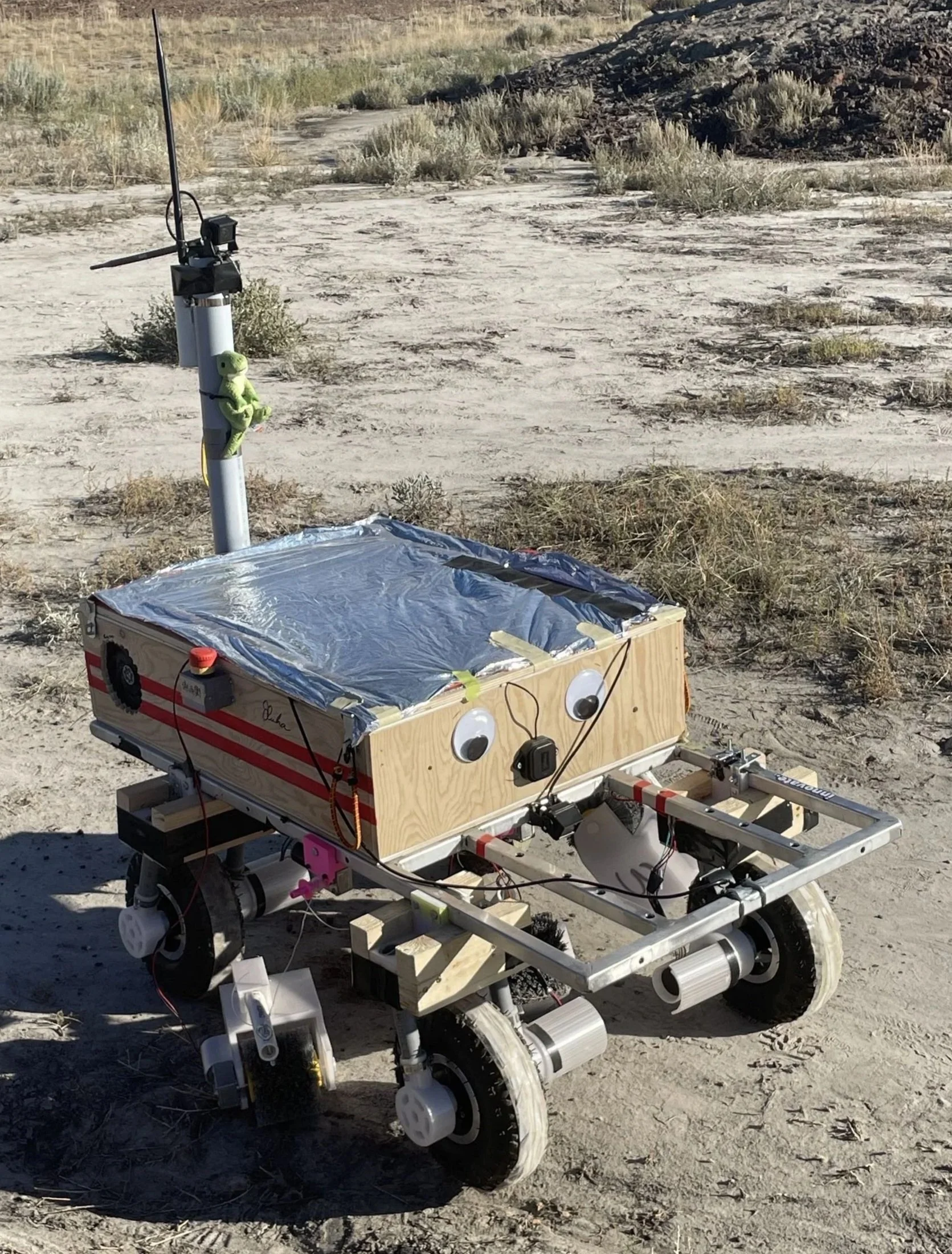
I joined the team in September of 2022, and as it was my first year on the team, I was determined to set myself apart from the other members who were perhaps just there to add something to their resume. I was very interested in the concept of the team from the beginning and wanted to make it one of the core aspects of my time at university. This was only the third year that the team even existed, so the rover was quite basic at this point. The chassis was a welded aluminum frame, the electronics enclosure was a simple wooden box, the legs were made of PVC pipe and 3D printed mounts, and the wheels were simple third party ones that were fit onto the legs with 3D printed parts.
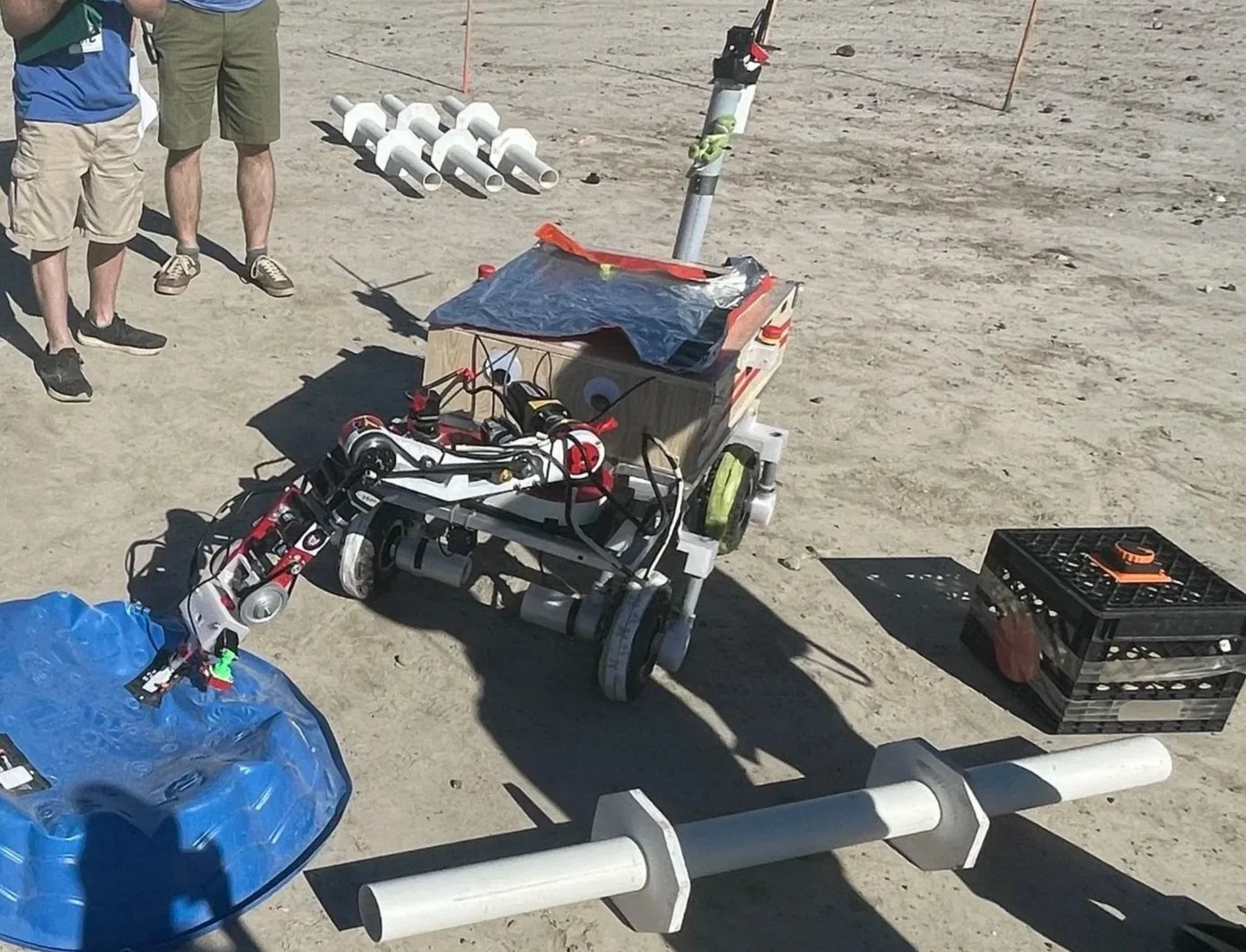
The rover could move in straight lines easily but utilized a tank steering method for turning which was not ideal. As a member I was responsible for developing a soil extraction tool, as that was a new task announced that had not been seen before at CIRC. I was originally thinking of a typical auger design, though when we found out that we did not actually need to core into the earth, and that top soil would suffice, I changed directions. I designed a system that would lower a separate device onto the ground using a winch, activate a brush that would “sweep” up soil into the container, and then reel the device back up. An initial testing video can be seen below of this in action. At competition, of the ~20 teams present that year, only three were able to autonomously pick up soil without human intervention, our team being one of them, which I was extremely proud of. Part way through the year in April of 2023, the lead at the time had to leave unexpectedly, so he appointed me as the new lead as I had shown the most enthusiasm as a member and he could tell that I wanted to stick with the team.
2023 - 2024
This was the year of the first full redesign of the rover the team had ever seen. They had been sporting the same aluminum frame and wooden box for a few years up until that point, and I was determined to completely redo the chassis, legs, and wheels from the ground up, as the team was not performing as well as they should have. I should say as a disclaimer that I had very little help this season, most of the members of my team ended up leaving quite early into the year and I only had one helpful member stay, and the rest that did stay did not have a high level of motivation. Due to this I took on almost all of the responsibility of design, manufacturing, and assembly, and ended up falling short of the deadline to get the redesign completed. I would have finished manufacturing and assembly right around the time that we went to competition, which would have left little to no time for the rest of the divisions to integrate properly. This taught me a very valuable lesson in time management during a project and the issue of scope creep.
This full redesign was aimed at solving four major issues with the old design:
The old aluminum frame was much too large for what the team needed, and it required a heavy auxiliary wooden electrical enclosure.
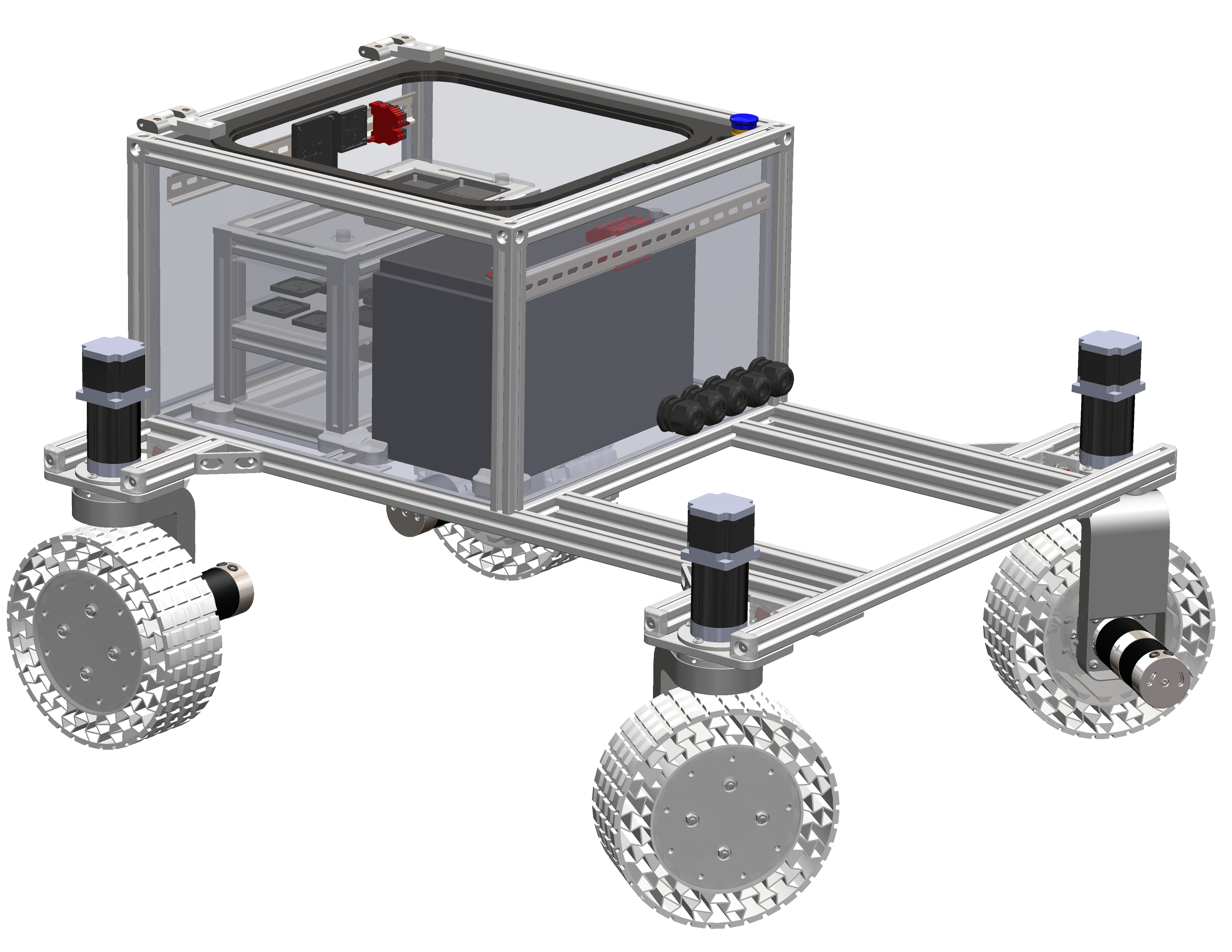
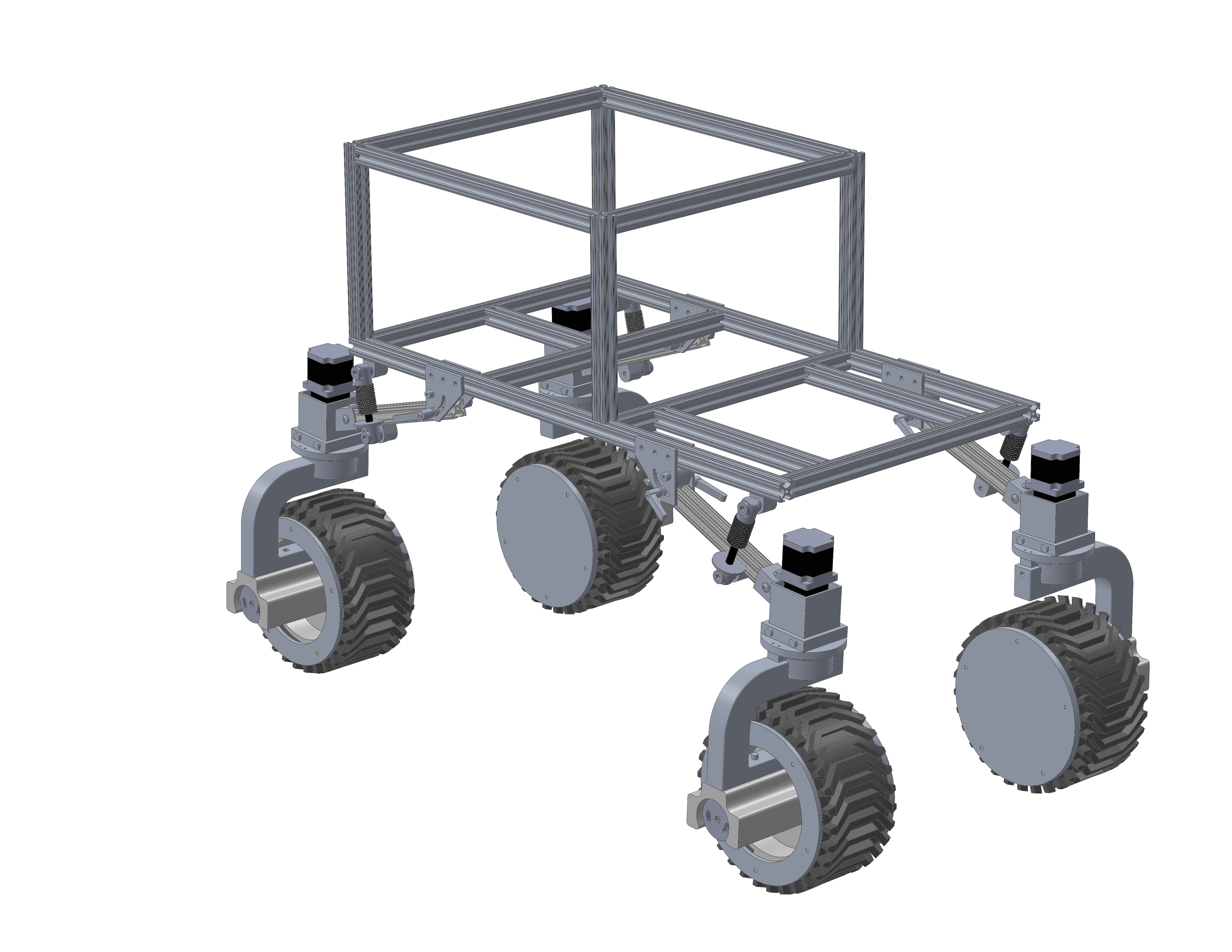
An aluminum extrusion chassis was created, allowing us to change the location of parts without needing to drill new holes by simply sliding things along the extrusions. It also made expansion very easy, as longer extrusions could be purchased in the future and retrofit if needed.
Tank steering was not ideal, as there was immense friction generated, leading to wear on the 3D printed leg and wheel mounts. The rover was also frequently unable to turn in this format, as the friction was way too high for the motors to overcome.
Each wheel was given its own stepper motor which would be able to independently turn each wheel, allowing for full articulation of the rover. This would give it incredible maneuverability during competition, something we struggled with in the past. Though in the rover we did end up bringing to competition, we needed to put packing tape on the 3D printed wheels because they were still gripping too much indoors when trying to turn.
There was no suspension system for dealing with the rolling badlands in Drumheller.
Each leg was to be assembled at an angle, with custom made springs inside of shock absorbers on each leg, giving us the ability to handle sharp changes in terrain with ease. The team realized this was needed after we snapped a leg mount during the 2023 competition (which can be seen evident by the two photos above in which one has wood reinforcing all of the leg mounts and one does not).
The rubber tires used before were too stiff and occasionally provided too much grip.
3D printed tires made out of TPU, which is a flexible elastomer, were printed which would give us proper traction indoors (an area that the rubber tires failed in by gripping too much) and would act as an additional suspension system by flexing around small rocks.
All of the parts that I had ordered from a third party CNC shop had come in too late to complete the rover, but we were able to spot that problem in time and we decided to use our new chassis and tires with our old PVC and 3D printed legs. This was a marginal victory, as the rover did perform better compared to previous years, but not the level I had envisioned for it a year earlier.
2024 - 2025
Due to the unfortunate failure of the previous year, this year I understood how important it was to have a strong team that could actually properly support me. I learned a lot from the previous year on how to lead better, how to delegate more, and how to pick people during the interview phase that shared my love and interest for the team. I had access to a much more enthusiastic candidate pool this year so I was able to assemble a much stronger team thankfully. During this year we identified that the rover I had designed before would technically work in ideal conditions, but had some flaws in the turning system, so we were able to redesign this again to perform much better.
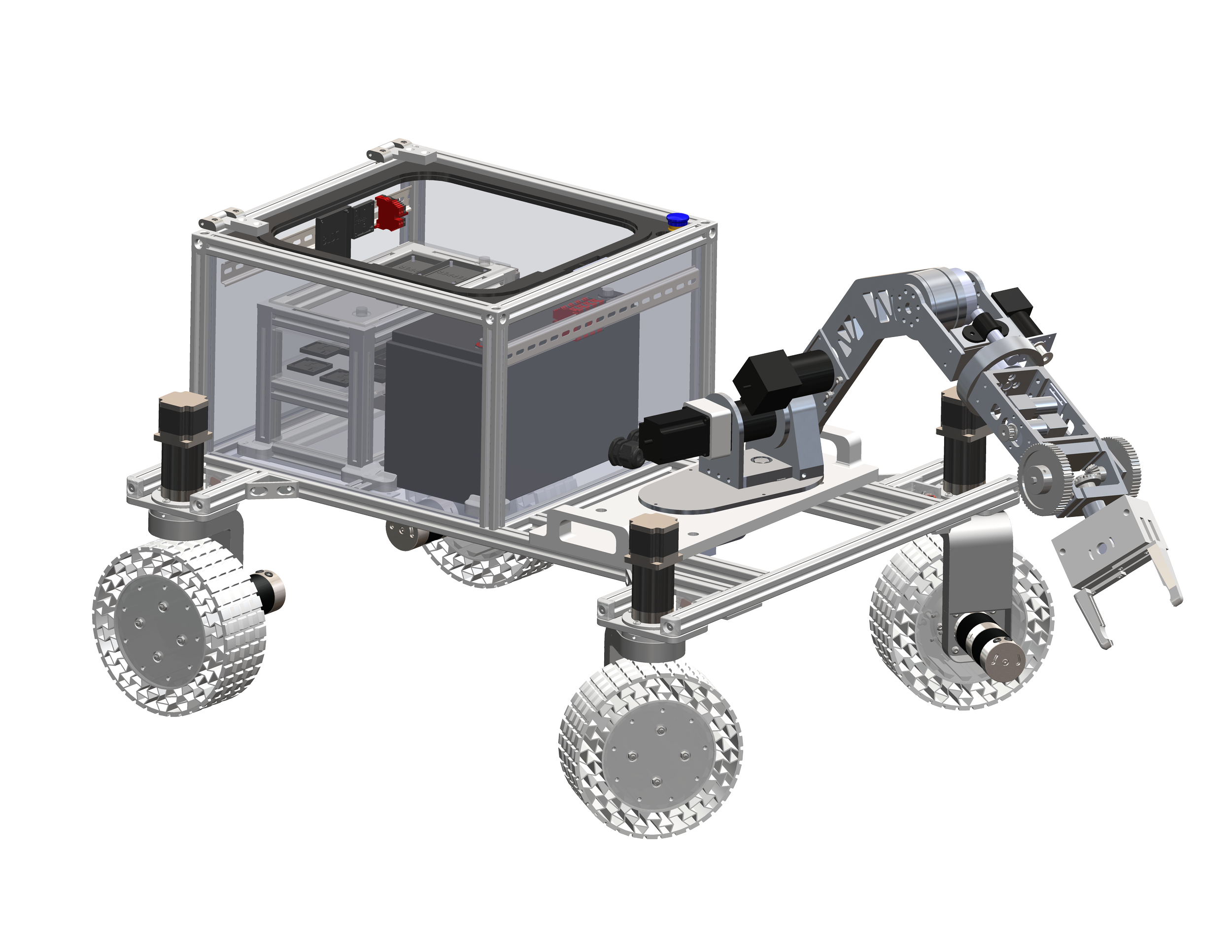
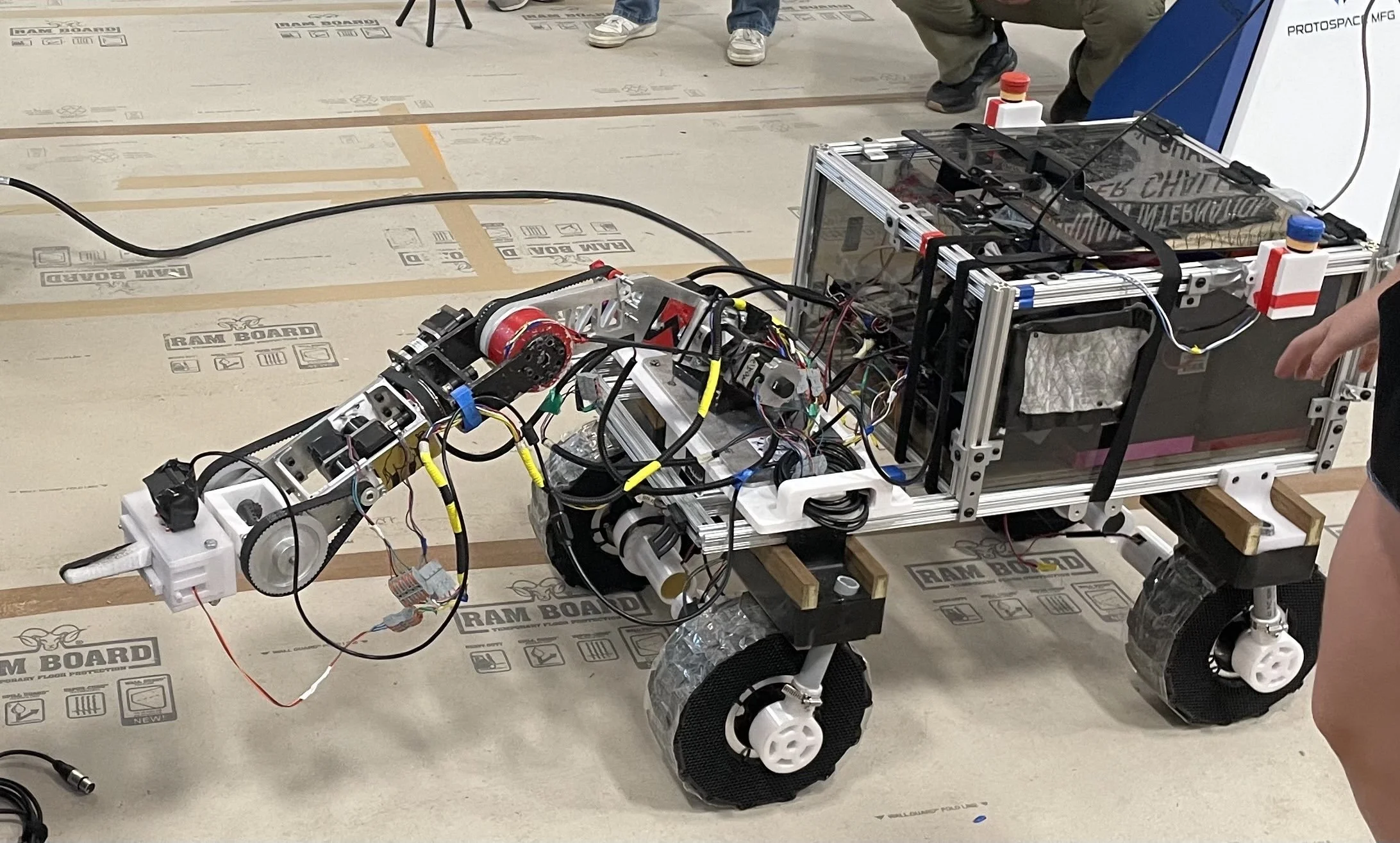
The new design reverted back to having no independent suspension system, as we discovered the previous year that the TPU tires performed their jobs extremely well and allowed us to easily roll over rocks. We kept a very similar design for the turning system but made use of tapered roller bearings and thrust bearings to drastically reduce friction, as that was a problem with the old design revealed after testing. We also designed bent and welded sheet metal legs which were a significant weight reduction compared to the solid aluminum ones in the previous design. There is a 70kg weight limit in the competition so weight saving was a big focus this year as my previous design was quite heavy, and any weight under 70kg would give us extra points during the competition.
Overall this year was our most successful year in terms of chassis, with us crushing most driving related things, unfortunately we had some catastrophic arm failures so we were unable to participate in many of the tasks, leading to less points overall than previous years. Despite this though I felt very successful this year, as we finally had been able to implement a proper turning system, a real dream of mine ever since I joined the team (in fact it was one of the questions I asked about during the first information session I attended in 2022). The rover also looked much more professional this year compared to previous years, as it had an almost entirely metal body, with just a few printed parts in the wheel area. A video of the turning system working can be seen below, with the rover sporting a makeshift arm that we created at the task to salvage any possible points.